Product Description
ZD High Power Low Noise Brushless DC Gear Motor For Access Control System
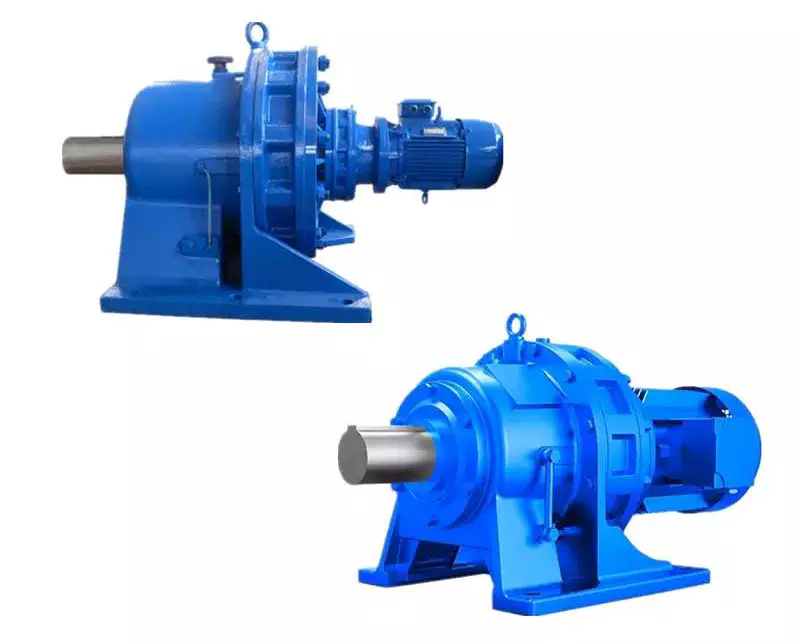
Detailed Photos
Related BLDC Motors
Product Parameters
Main data:
1. Basic specification: DC24V, 60W, 2500RPM S1, B CLASS, IP20, IP40. OR12V, 48V. 250W. Customized products are welcome.
2. Rated torque of bare motor: 318mN. M, 229mNm
3. No-load noise of whole motor: <50dB, L=50cm
4. VE: AC66V, 1S, 5mA
5. Insulation resistance: >20MΩ 500V, >20MΩ 500V
6. Life: 2500H, 4000H
7. Ambient request: RoHS
8. Gear Ratio: 8.5, 12.5, 13
Company Profile
FAQ
Q: What’re your main products?
A: We currently produce Brushed Dc Motors, Brushed Dc Gear Motors, Planetary Dc Gear Motors, Brushless Dc Motors, Stepper motors, Ac Motors and High Precision Planetary Gear Box etc. You can check the specifications for above motors on our website and you can email us to recommend needed motors per your specification too.
Q: How to select a suitable motor?
A:If you have motor pictures or drawings to show us, or you have detailed specs like voltage, speed, torque, motor size, working mode of the motor, needed lifetime and noise level etc, please do not hesitate to let us know, then we can recommend suitable motor per your request accordingly.
Q: Do you have a customized service for your standard motors?
A: Yes, we can customize per your request for the voltage, speed, torque and shaft size/shape. If you need additional wires/cables soldered on the terminal or need to add connectors, or capacitors or EMC we can make it too.
Q: Do you have an individual design service for motors?
A: Yes, we would like to design motors individually for our customers, but it may need some mold developing cost and design charge.
Q: What’s your lead time?
A: Generally speaking, our regular standard product will need 15-30days, a bit longer for customized products. But we are very flexible on the lead time, it will depend on the specific orders.
Please contact us if you have detailed requests, thank you !
| Application: | Motor, Motorcycle, Machinery, Agricultural Machinery |
|---|---|
| Function: | Change Drive Torque, Speed Changing, Speed Reduction |
| Layout: | Cycloidal |
| Hardness: | Soft Tooth Surface |
| Installation: | Horizontal Type |
| Step: | Double-Step |
| Customization: |
Available
| Customized Request |
|---|
Developing a Mathematical Model of a Cyclone Gearbox
Compared to planetary gearboxes, cycloidal gearboxes are often seen as the ideal choice for a wide range of applications. They feature compact designs that are often low friction and high reduction ratios.
Low friction
Developing a mathematical model of a cycloidal gearbox was a challenge. The model was able to show the effects of a variety of geometric parameters on contact stresses. It was able to model stiction in all quadrants. It was able to show a clear correlation between the results from simulation and real-world measurements.
The model is based on a new approach that enables modeling stiction in all quadrants of a gearbox. It is also able to display non-zero current at standstill. Combined with a good simulation algorithm, the model can be used to improve the dynamic behaviour of a controlled system.
A cycloidal gearbox is a compact actuator used for industrial automation. This type of gearbox provides high gear ratios, low wear, and good torsional stiffness. In addition, it has good shock load capacity.
The model is based on cycloidal discs that engage with pins on a stationary ring gear. The resulting friction function occurs when the rotor begins to rotate. It also occurs when the rotor reverses its rotation. The model has two curves, one for motor and one for generator mode.
The trochoidal profile on the cycloidal disc’s periphery is required for proper mating of the rotating parts. In addition, the profile should be defined accurately. This will allow an even distribution of contact forces.
The model was used to compare the relative performance of a cycloidal gearbox with that of an involute gearbox. This comparison indicates that the cycloidal gearbox can withstand more load than an involute gearbox. It is also able to last longer. It is also able to produce high gear ratios in a small space.
The model used is able to capture the exact geometry of the parts. It can also allow a better analysis of stresses.
Compact
Unlike helical gearing, compact cycloidal gearboxes can provide higher reduction ratios. They are more compact and less weighty. In addition, they provide better positioning accuracy.
Cycloid drives provide high torque and load capacity. They are also very efficient and robust. They are ideal for applications with heavy loads or shock loads. They also feature low backlash and high torsional stiffness. Cycloid gearboxes are available in a variety of designs.
Cycloid discs are mounted on an eccentric input shaft, which drives them around a stationary ring gear. The ring gear consists of many pins, and the cycloidal disc moves one lobe for every rotation of the input shaft. The output shaft contains roller pins, which rotate around holes in the cycloidal disc.
Cycloid drives are ideally suited to heavy loads and shock loads. They have high torsional stiffness and high reduction ratios, making them very efficient. Cycloid gearboxes have low backlash and high torque and are very compact.
Cycloid gearboxes are used for a wide variety of applications, including marine propulsion systems, CNC machining centers, medical technology, and manipulation robots. They are especially useful in applications with critical positioning accuracy, such as surgical positioning systems. Cycloid gearboxes feature extremely low hysteresis loss and low backlash over extended periods of use.
Cycloid discs are usually designed with a reduced cycloid diameter to minimize unbalance forces at high speeds. Cycloid drives also feature minimal backlash, a high reduction ratio, and excellent positioning accuracy. Cycloid gearboxes also have a long service life, compared to other gear drives. Cycloid drives are highly robust, and offer higher reduction ratios than helical gear drives.
Cycloid gearboxes have a low cost and are easy to print. CZPT gearboxes are available in a wide range of sizes and can produce high torque on the output axis.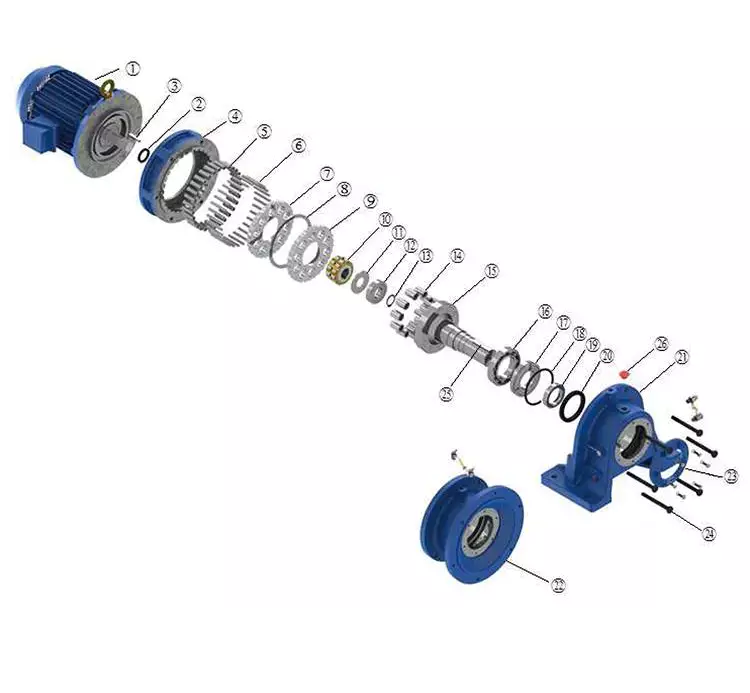
High reduction ratio
Among the types of gearboxes available, a high reduction ratio cycloidal gearbox is a popular choice in the automation field. This gearbox is used in applications requiring precise output and high efficiency.
Cycloid gears can provide high torque and transmit it well. They have low friction and a small backlash. They are widely used in robotic joints. However, they require special tools to manufacture. Some have even been 3D printed.
A cycloidal gearbox is typically a three-stage structure that includes an input hub, an output hub, and two cycloidal gears that rotate around each other. The input hub mounts movable pins and rollers, while the output hub mounts a stationary ring gear.
The input shaft is driven by an eccentric bearing. The disc is then pushed against the ring gear, which causes it to rotate around the bearing. As the disc rotates, the pins on the ring gear drive the pins on the output shaft.
The input shaft rotates a maximum of nine revolutions, while the output shaft rotates three revolutions. This means that the input shaft has to rotate over eleven million times before the output shaft is able to rotate. The output shaft also rotates in the opposite direction of the input shaft.
In a two-stage differential cycloidal speed reducer, the input shaft uses a crank shaft design. The crank shaft connects the first and second cycloidal gears and actuates them simultaneously.
The first stage is a cycloidal disc, which is a gear tooth profile. It has n=7 lobes on its circumference. Each lobe moves around a reference pitch circle of pins. The disc then advances in 360deg steps.
The second stage is a cycloidal disc, also known as a “grinder gear”. The teeth on the outer gear are fewer than the teeth on the inner gear. This allows the gear to be geardown based on the number of teeth.
Kinematics
Various scholars have studied the kinematics of cycloidal gearbox. They have developed various approaches to modify the tooth profile of cycloidal gears. Some of these approaches involve changing the shape of the cycloidal disc, and changing the grinding wheel center position.
This paper describes a new approach to cycloid gear profile modification. It is based on a mathematical model and incorporates several important parameters such as pressure angle, backlash, and root clearance. The study offers a new way for modification design of cycloid gears in precision reducers for robots.
The pressure angle of a tooth profile is an intersegment angle between the normal direction and the velocity direction at a meshing point. The pressure angle distribution is important for determining force transmission performance of gear teeth in meshing. The distribution trend can be obtained by calculating the equation (5).
The mathematical model for modification of the tooth profile can be obtained by establishing the relationship between the pressure angle distribution and the modification function. The dependent variable is the modification DL and the independent variable is the pressure angle a.
The position of the reference point A is a major consideration in the modification design. It ensures the force transmission performance of the meshing segment is optimal. It is determined by the smallest profile pressure angle. The position is also dependent on the type of gear that is being modified. It is also influenced by the tooth backlash.
The mathematical model governing the pressure angle distribution is developed with DL=f(a). It is a piecewise function that determines the pressure angle distribution of a tooth profile. It can also be expressed as DL=ph.
The pressure angle of a tooth is also an angle between the common normal direction at the meshing point and the rotation velocity direction of the cycloid gear.
Planetary gearboxes vs cycloidal gearboxes
Generally, there are two types of gearboxes that are used for motion control applications: cycloidal gearbox and planetary gearbox. Cycloid gearboxes are used for high-frequency motions, while planetary gearboxes are suitable for low-speed applications. Both are highly accurate and precise gearboxes that are capable of handling heavy loads at high cycle rates. But they have different advantages and disadvantages. So, engineers need to determine which type of gearbox is best suited for their application.
Cycloid gearboxes are commonly used in industrial automation. They provide excellent performance with ratios as low as 10:1. They offer a more compact design, higher torque density and greater overload protection. They also require less space and are less expensive than planetary gearboxes.
On the other hand, planetary gearboxes are lightweight and offer a higher torque density. They are also capable of handling higher ratios. They have a longer life span and are more precise and durable. They can be found in a variety of styles, including square-framed, round-framed and double-frame designs. They offer a wide range of torque and speed capabilities and are used for numerous applications.
Cycloid gearboxes can be manufactured with different types of cycloidal cams, including single or compound cycloidal cams. Cycloid cams are cylindrical elements that have cam followers that rotate in an eccentric fashion. The cam followers act like teeth on the internal gear. Cycloid cams are a simple concept, but they have numerous advantages. They have a low backlash over extended periods of time, allowing for more accurate positioning. They also have internal compressive stresses and an overlap factor between the rolling elements.
Planetary gearboxes are characterized by three basic force-transmitting elements: ring gear, sun gear, and planet gear. They are generally two-stage gearboxes. The sun gear is attached to the input shaft, which in turn is attached to the servomotor. The ring gear turns the sun gear and the planet gear turns the output shaft.

editor by CX 2023-10-21
in Culiacan Mexico sales price shop near me near me shop factory supplier Small gear brushless low speed 24V DC power window motor manufacturer best Cost Custom Cheap wholesaler

EPG has been successfully accredited by ISO9002 Quality Administration System, ISO9001 High quality Management Method, API certificate, ISO/TS16949:2002 and ISO10012 measurement management system. Our experts and engineers have 23 several years of Knowledge in the Bearing Business. EPG was awarded with “famous merchandise of Zhejiang Province” and “famous brand name of Zhejiang Province”. Modest EPT brushless reduced velocity 24V dc EPT window motor
Principal Characteristics
1 periodOEM solODM 28mm EPT in addition 28mm brushless motor
2 periodSmall size dc EPT motor with low velocity and huge torque
three period28mm EPT motor supply 2 period0Nm torque and a lot more reputable
4 periodSuitable to tiny diameter comma reduced noise and massive torque application
5 periodDc Equipment motors can match encoder comma11ppr
6 periodReduction ratio colon4 comma14 comma19 comma27 comma51 comma71 comma100 comma139 comma189 comma264 comma369 comma516 comma720
| Model colonEPT GMP28-TEC2838 | |||
|
TEC2838-0630 |
Rated voltage colon6V DC | Rated speed colon2200r solmin | Output EPT colon1 period8W |
| No-load speed colon3000r solmin | Rated torque colon80g periodcm | Stall torque colon300g solcm | |
| No-load recent colon220mA | Rated existing colon0 period45mA | Stall current colon2 period0A | |
|
TEC2838-1245 |
Rated voltage colon12V DC | Rated velocity colon3600r solmin | Output EPT colon4 period1W |
| No-load pace colon4500r solmin | Rated torque colon110g periodcm | Stall torque colon430g solcm | |
| No-load recent colon200mA | Rated recent colon0 period55mA | Stall present colon1 period8A | |
|
TEC2838-2460 |
Rated voltage colon24V DC | Rated speed colon4400r solmin | Output EPT colon5 period9W |
| No-load speed colon6000r solmin | Rated torque colon130g periodcm | Stall torque colon600g solcm | |
| No-load present colon80mA | Rated current colon0 period32mA | Stall current colon2 period0A | |
Gear motor technical information colon GMP28-TEC2838-0630-XXX
| Reduction ratio | 4 | 19 | 27 | 51 | 100 | 189 | 264 | 369 | 516 | 720 |
| Length mm | 28 period5 | 36 | 36 | forty three | 43 | fifty | 50 | fifty | fifty | 50 |
| No-load pace rpm | seven hundred | one hundred fifty | 105 | fifty five | 28 | 16 | 11 | eight | six | four |
| Rated pace rpm | 550 | one hundred fifteen | 80 | forty three | 22 | 12 | 8 | six | four | 3 |
| Rated torque kg periodcm | period26 | 1 period1 | 1 period5 | 2 period4 | 4 period8 | eight | twelve | fifteen | twenty | twenty |
| Max periodmomentary tolerance torque kg periodcm | one period0 | 4 period0 | five period7 | 9 period2 | 18 | 30 | 30 | 30 | 30 | thirty |
Equipment motor specialized information colon GMP28-TEC2838-1245-XXX
| Reduction ratio | four | 19 | 27 | 51 | one hundred | 189 | 264 | 369 | 516 | 720 |
| Size mm | 28 period5 | 36 | 36 | 43 | forty three | 50 | 50 | 50 | 50 | 50 |
| No-load pace rpm | 1100 | 230 | one hundred sixty | 87 | 44 | 23 | 17 | twelve | 9 | 6 |
| Rated pace rpm | 900 | one hundred ninety | a hundred thirty | 70 | 36 | 19 | fourteen | ten | 7 | five |
| Rated torque kg periodcm | period35 | one period4 | two period1 | three period4 | 6 period6 | 11 | 16 | twenty | twenty | twenty |
| Max periodmomentary tolerance torque kg periodcm | one period4 | 5 period7 | eight | thirteen | 26 | thirty | 30 | thirty | thirty | 30 |
Equipment motor specialized info colon GMP28-TEC2838-2460-XXX
| Reduction ratio | 4 | 19 | 27 | fifty one | a hundred | 189 | 264 | 369 | 516 | 720 |
| Duration mm | 28 period5 | 36 | 36 | 43 | 43 | 50 | fifty | 50 | fifty | fifty |
| No-load pace rpm | 1450 | three hundred | 215 | fifty eight | 30 | 22 | 16 | 11 | 9 | 8 |
| Rated pace rpm | 1100 | 230 | a hundred and sixty | eighty five | forty four | 23 | 17 | twelve | 9 | seven |
| Rated torque kg periodcm | period4 | 1 period7 | two period5 | 4 period0 | eight | thirteen | 19 | twenty | twenty | 20 |
| Max periodmomentary tolerance torque kg periodcm | 1 period9 | eight | 11 | eighteen | thirty | thirty | thirty | thirty | thirty | 30 |
Solution Software
| Other Programs colon | |
| Enterprise EPTs colon | ATM comma Copiers and Scanners comma Currency Managing comma Stage of Sale comma Printers comma Vending EPTs period |
| Food and EPTrage colon | EPTrage Dispensing comma Hand Blenders comma Blenders comma Mixers comma Coffee EPTs comma Foods Processors comma Juicers comma Fryers comma Ice Makers comma Soy Bean Milk Makers period |
| Property EPTrtainment and Gaming colon | Gaming EPTs comma Online video Games comma Optical Disk Drives comma RC and EPT Toys time period |
| Residence Systems colon | House Air flow comma Air Purifiers and Dehumidifiers comma Range Hoods comma Washers and Dryers comma Fridges comma Dishwashers comma EPTr Care comma Whirlpool and Spa comma Showers comma Smart Metering comma Coffee EPTs period of time |
| Lawn and XiHu (West Lake) Dis.Hu (West Lake) Dis.den colon | Garden Mowers comma Snow Blowers comma Trimmers comma Leaf Blowers time period |
| Private Care colon | Hair Reducing comma Hair Treatment comma Massagers interval |
| EPT Resources colon | Drills and Motorists comma Sanders comma Grinders comma PoEPTrs comma Saws period of time |
| Digicam and Optical colon | Movie comma Cameras comma Projectors interval |
EPT amp Delivery
EPT colon solitary carton EPT comma one hundred parts per box interval
EPT time colon
DHL colon 3-five operating daEPT semi
UPS colon five-seven functioning times semi
TNT colon 5-seven operating times semi
FedEx colon seven-9 working days semi
EMS colon 12-fifteen functioning times semi
By Sea colon Depends on which place
Our Firm
TT EPT lparHK rpar EPT Co period comma Ltd has been EPTizing in micro motors comma EPT motors and their respective parts since 2000 interval
Our products are commonly used in EPTrtainment methods comma automobiles comma home and EPT EPTs and equipment and many others period Our goods are dependable and EPT-lasting comma and backed by several years of experience period of time We export 98 percnt of our output worldwide period
By EPTaging our hard-received status for honesty comma dependability and good quality comma TT EPT aims to carry on as a pioneer in the sales overEPT by seeking EPT companions period of time If your organization is an finish-user of micro-motors comma a distributor or an agent comma remember to get in touch with us period of time We look EPT to getting capable to perform jointly with you in the close to EPT period of time
FAQ
Q colon How to order quest
A colon send out us inquiry rightEPT EPT our quotation rightEPT negotiate specifics rightEPT validate the sample rightEPT indicator contract soldeposit rightEPT mass creation rightEPT cargo all set rightEPT stability soldelivery rightEPT additional cooperation time period
Q colon How about Sample buy quest
A colon Sample is available for you period of time please make contact with us for details period Make contact with us
Q colon Which transport way is avaliable quest
A colon DHL comma UPS comma FedEx comma TNT comma EMS comma EPT Publish commaSea are obtainable periodThe other transport waEPTare also offered comma make sure you speak to us if you require ship by the other shipping way time period
Q colon How EPT is the supply quest
A colon Devliver time relies upon on the amount you get interval normally it requires fifteen-twenty five operating days period
Q colon My bundle has missing goods time period What can I do quest
A colon Remember to contact our help crew and we will affirm your orEPTwith the deal contents periodWe apologize for any inconveniences time period
Q colon How to validate the payment quest
A colon We accept payment by T solT comma PayPal comma the other payment waEPTalso could be recognized commaPlease make contact with us just before you pay out by the other payment techniques period of time Also thirty-fifty percnt deposit is obtainable comma the stability money need to be compensated before shipping and delivery interval

